Вспомнил немного хардкора в хардваре с TWI интерфейсом, которым занимался несколько лет назад. Кто бы что ни говорил, а Assembler отлично прочищает мозги и развивает понимание алгоритмов. Самое главное, что я усвоил при работе с AVR микроконтроллерами на Аssembler, так это то, что все операции, все директивы, все функции должны писаться в чёткой последовательности. Ведь если записать данные в регистр не в той последовательности, то Ваша прошивка контроллера вообще не заработает. А при написании программного кода на высокоуровневых языках порой можно увидеть полное безразличие в последовательности вызова функций и методов, хотя зачастую в инструкциях к библиотекам можно прочесть, в какой последовательности нужно инициализировать тот или иной функционал, чтобы всё работало. Но кто бы их читал внимательно? Хорошо, если Вы дорогой читатель прочитали этот абзац, а не скопипастили сходу себе программный код библиотеки, который представлен ниже.
TWI интерфейс
Данный тип внутрисхемного интерфейса является аналогом интерфейса I2C , который был разработан компанией Philips в 1980-х годах. Этот интерфейс применяется как аппаратный модуль микроконтроллеров Atmega и значительно облегчает работу с шиной I2C , по которой работают другие устройства. Название отличное от I2C является результатом воздействия патентного законодательства.
Как и шина I2C , интерфейс TWI также работает по двум двунаправленным линиям связи: SDA (англ. Serial DAta) и SCL (анлг. Serial CLock). Обе линии связи подтягиваются в схеме резисторами к питанию, которое обычно составляет +5 и +3.3 Вольта. Адресное пространство в классическом варианте составляет 128 адресов, в расширенном стандарте 1024 адреса.
Существует четыре вида значимых состояний на шине, из которых состоит работа интерфейса:
- СТАРТ - изменение состояния линии SDA от 1 к 0, при неизменном состоянии SCL в 1
- СТОП - изменение состояния линии SDA от 0 к 1 , при неизменном состоянии SCL в 1
- Передача бита равного 1 - SDA в состоянии 1, SCL изменяет состояние 0-1-0
- Передача бита равного 0 - SDA в состоянии 1, SCL изменяет состояние 0-1-0
Изменение состояния SDA при SCL равном 1 не играет никакой роли и игнорируется.
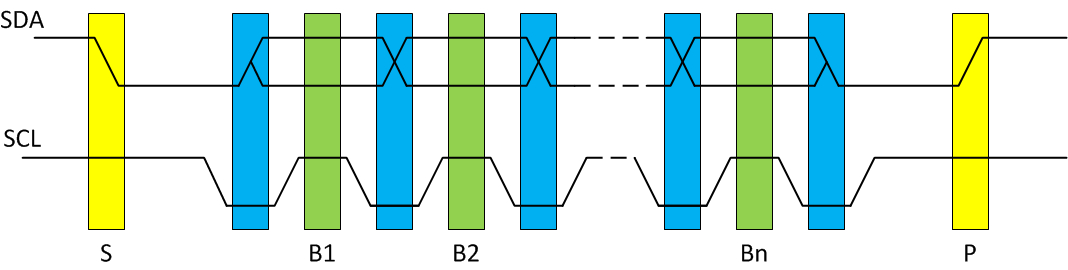
Шина TWI работает по принципу Ведущий-Ведомый. Ведущий подаёт стартовую посылку, после чего начинает передачу байта информации. Как только Ведомый принял информацию, он отправляет бит подтверждения. Окончание передачи данных определяется стоповой посылкой.
Библиотека для работы с TWI интерфейсом
В данной статье представлена библиотека для работы с TWI интерфейсом, которая предназначена для микроконтроллеров Atmega48 , Atmega88 , Atmega168 , Atmega328 . Также библиотека может применяться для работы и другими микроконтроллерами Atmega, которые имеют TWI интерфейс.
Внимание. Названия регистров в различных моделях могут отличаться.
- /*
- * i2c_lib.asm
- *
- * Библиотека процедур для шины i2c (Atmega48)
- * Библиотека предназначена для использования в качестве подключаемого модуля
- * к другим проектам.
- *
- * Библиотека работает с интерфейсом TWI в avr микроконтроллерах
- *
- * Библиотека работает с регистром r16
- *
- * Created: 15.07.2013 23:51:32
- * Author: Евгений Легоцкой
- */
- ;======= Стартовая посылка по шине i2c =================================================
- i2c_start:
- push r16
- ldi r16,(1<<TWINT)|(1<<TWSTA)|(1<<TWEN) ; Выполняем посылку стартовой комбинации
- sts TWCR,r16 ; Посылаем полученный байт в TWCR
- rcall i2c_wait ; Ожидание формирования start в блоке TWI
- pop r16 ; Возвращаем данные в r16 из стека
- ret
- ;======= Стоповая посылка по шине i2c ==================================================
- i2c_stop:
- push r16
- ldi r16,(1<<TWINT)|(1<<TWSTO)|(1<<TWEN) ; Отправляем стоповую посылку
- sts TWCR,r16 ; Посылаем полученный байт в TWCR
- pop r16 ; Возвращаем данные в r16 из стека
- ret
- ;======= Посылка байта информации по шине i2c ==========================================
- i2c_send:
- push r16
- sts TWDR,r16 ; Записываем передаваемый байт в регистр TWDR
- ldi r16,(1<<TWINT)|(1<<TWEN) ; Формируем байт, отвечающий
- ; за пересылку информационного байта
- sts TWCR,r16 ; Посылаем полученный байт в TWCR
- rcall i2c_wait ; Ожидание окончания пересылки байта
- pop r16 ; Возвращаем данные в r16 из стека
- ret
- ;======= Приём информационного байта по шине i2c =======================================
- i2c_receive:
- ; Принятый байт помещается в регистр r16, поэтому рекомендуется
- ; продумать программу так, чтобы в этот момент в нём не было
- ; важной информации, байт не сохраняется в стеке в коде данной
- ; процедуры
- ldi r16,(1<<TWINT)|(1<<TWEN)|(1<<TWEA) ; Формируем байт, отвечающий за прием
- sts TWCR,r16 ; Посылаем полученный байт в TWCR
- rcall i2c_wait ; Ожидание окончания приёма байта
- lds r16,TWDR ; Считываем полученную информацию из TWDR
- ret
- ;======= Приём последнего байта (NACK) =================================================
- i2c_receive_last:
- ; Принятый байт помещается в регистр r16, поэтому рекомендуется
- ; продумать программу так, чтобы в этот момент в нём не было
- ; важной информации, байт не сохраняется в стеке в коде данной
- ; процедуры
- ldi r16,(1<<TWINT)|(1<<TWEN) ; Формируем байт, отвечающий за прием информационного байта
- sts TWCR,r16 ; Посылаем полученный байт в TWCR
- rcall i2c_wait ; Ожидание окончания приёма байта
- lds r16,TWDR ; Считываем полученную информацию из TWDR
- ret
- ;======= Ожидание готовности TWI =======================================================
- i2c_wait:
- lds r16,TWCR ; Загружаем значение из TWCR в r16
- sbrs r16,TWINT ; Функция ожидания выполняется до тех пор, пока поднят флаг
- ; прерывания в 1
- rjmp i2c_wait
- ret
- ;=======================================================================================
Внимание. Также для работы библиотеки требуется инициализировать Стек микроконтроллера. Например следующим образом:
- ;======= Макросы =========================================================================
- ; Макрос вывода в порт или регистр
- .macro outi
- ldi r16, @1
- out @0,R16
- .endm
- ;=========================================================================================
- RESET:
- outi SPL,Low(RAMEND) ; Инициализация стека
- outi SPH,High(RAMEND)
